|

|
Lenkverfahren für rohrabgefeuerte Panzerabwehrraketen
Bereits zum Ende des 2. Weltkrieg begannen
die Entwickler aller panzerproduzierenden Staaten nach neuen
Wegen auf dem Gebiet der Panzerbewaffnung zu suchen. Die zukünftige
Bewaffnung sollte eine höchstmögliche Treffwahrscheinlichkeit
auf maximale Entfernungen gewährleisten und die Vernichtung
auch schwerer Kampfpanzer erlauben. Die ersten modernen Panzerabwehrlenkraketen
waren entwickelt worden. Es lag also auf der Hand, den inzwischen
erreichten technologischen Stand in der Raketentechnik und der
Elektronik für die Entwicklung neuer Kampfpanzer nutzbar zu
machen. Bereits Mitte der 50er Jahre begannen entsprechende
Entwicklungsarbeiten
in den USA, Frankreich und in der Sowjetunion, die relativ rasch
zu ersten Ergebnissen führten. Die in der Sowjetunion entworfenen
Projekte waren keine klassischen Kampfpanzer, sondern entsprachen
eher dem mit Lenkraketen bewaffneten Jagdpanzer. Diese Entwicklungsrichtung wurde später
als wenig aussichtsreich aufgegeben und die sowjetischen Entwicklerteams
sahen die zukünftige Lösung in der aus dem Rohr einer großkalibrigen Panzerkanone
verschießbaren Panzerabwehrlenkrakete.
Frankreich entwickelte im Zuge der Arbeiten am Kampfpanzer AMX-30
eine 142 mm Kanone, die auch den Verschuss von Lenkraketen
ACRA erlaubte. Das Projekt wurde trotz erfolgversprechender
Ergebnisse aufgegeben, weil die Leistung der 105 mm Kanone
als völlig ausreichend zum Vernichten der damaligen Kampfpanzer
bewertet wurde. In den USA befand sich eine neuartige 152 mm Kombinationswaffe
auf den Reissbrettern der Entwicklungsingenieure, die neben konventioneller Munition auch
Lenkraketen Shillelagh verschießen konnte. Die Kanone wurde ab
1966 in den leichten Panzer M551 Sheridan und kurze Zeit später
in den Kampfpanzer
M60A2 eingebaut. Mit den Leistungen beider Gefechtsfahrzeuge
waren die Verantwortlichen jedoch nie wirklich zufrieden, so
dass sie nach wenigen Jahren Truppendienst wieder durch konventionelle
Panzer abgelöst wurden. Seit dem sind nur noch russische Kampfpanzer und
Schützenpanzer
mit einer rohrverschießbaren Lenkrakete bewaffnet.
Der Artikel
beschäftigt sich mit den Verfahrensweisen der Steuerung von
rohrverschießbaren Lenkraketen und beschränkt sich notwendigerweise
auf die Darstellung grundlegender Kenntnisse ohne Anspruch auf
volle Umfänglichkeit..
Wichtige technische Daten zu den bisher entwickelten
Lenkwaffenanlagen
|
|
SHILLELAGH
|
ACRA
|
9K112
KOBRA
|
9K116-1
BASTION
|
9K116-2
SHEKSNA
|
9K119
REFLEKS
|
9K120
SVIR
|
LAHAT
|
|
Lenkverfahren
|
|
SACLOS,
|
SACLOS,
|
SACLOS,
|
Beam Rider,
|
Beam Rider,
|
Beam Rider,
|
Homing,
|
|
Signalmedium
|
|
Infrarot
|
Laser
|
Funk
|
Laser
|
Laser
|
Laser
|
Laser
|
|
Entwicklung
|
|
bis ~ 1965
|
bis ~ 1967
|
bis ~ 1975
|
bis ~ 1980
|
bis ~ 1985
|
bis ~ 1985
|
~ 1990
|
|
Kaliber
|
mm
|
152
|
142
|
125
|
100
|
115
|
125
|
125
|
105 / 120
|
|
Wirkung
|
|
HEAT
|
HEAT o. HE
|
HEAT
|
HEAT
|
HEAT o. HE
|
HEAT o. HE
|
HEAT o. HE
|
|
Fluggeschwindigkeit
|
m/s
|
320
|
550
|
400
|
320
|
350
|
350
|
?
|
|
Einsatzentfernung
minimal
... maximal
|
m
m
|
730 ...
3000
|
? ...
min.
3000
|
100 ...
4000
|
100 ...
4000
|
100 ...
5000
|
100 ...
5000
|
? ...
mind.
6000
|
|
Zieleinrichtung
|
|
M126,
Teleskop
M149, Teleskop
|
?
|
1G21
|
1K113
|
1G46
|
1K113
|
?
|
|
Kampfpanzer
|
|
M60A2, M551
(MBT-70)
|
AMX-30
|
T-64B, T-80B
|
T-55
|
T-62
|
T-80U, T-80UD T-64BM,
T-90
|
T-72B
|
MERKAVA
|
|
Kanone
|
|
152 mm M81
|
?
|
2A46M
|
D-10T2S
|
U-5TS
|
2A46M
|
2A46M
|
120 mm Rh
|
1. SACLOS - Semi-Automatic Command to Line of Sight
Die ersten Panzerabwehrlenkraketen wurden
mit Hilfe eines einfachen Zielfernrohres und eines Lenkgriffes
nach Sicht auf das Ziel gesteuert, während die Steuersignale
durch einen feinen Lenkdraht, der aus der Rakete abgespult wurde,
an den Flugkörper übermittelt wurden. Diese manuelle Steuerung
war äußerst schwierig zu handhaben und extrem ausbildungsintensiv.
Sie wurde deshalb relativ rasch durch eine halbautomatische Steuerung
ersetzt, die sich dadurch auszeichnet, dass sich die Aufgabe
des Schützen darauf beschränkt, das Ziel mit einem Zielfernrohr
anzurichten und gegebenfalls zu begleiten. Eine optoelektronische
Einrichtung im Zielfernrohr ermittelt automatisch die Position
der Lenkrakete in Bezug zur Visierlinie und berechnet die notwendigen Lenksignale, die dann
über ein geeignetes Medium an die Lenkrakete übermittelt werden.
Viele Lenkraketensysteme verwenden noch heute die Signalübertragung
über einen sich aus der Rakete abwickelnden, extrem dünnen Draht.
1.1 SACLOS mit Infrarotkommandolenkung
Für den Verschuss der Lenkrakete aus einem Geschützrohr ist
die Verwendung eines Lenkdrahtes allerdings schon deswegen nicht
zweckmäßig, weil dieser Draht nach der Zielbekämpfung im
Geschützrohr verbleibt und umständlich entfernt werden müsste. Deswegen wurde für den leichten
Kampfpanzer M551 Sheridan eine Einrichtung entwickelt, die die
Übertragung der Lenksignale an die Lenkrakete über einen gerichteten,
engen Infrarotstrahl gewährleistet. Eine gleichartige Anlage
fand später beim Kampfpanzer M60A2 Verwendung und war auch für
das Kampfpanzerprojekt MBT-70 vorgesehen. Die Lenkrakete
Shillelagh wurde beim Laden durch eine an ihr befindlichen
hervorstehende Leiste in der Führungsnut der 152 mm Kanone in der senkrechten
Ausgangsposition in Bezug zur Raketenlängsachse und des Kreiselkoordinators
orientiert. Nach Betätigen der Abfeuerung wird die Rakete initialisiert
und der Kreisel des Kreiselkoordinators läuft an. Kurz danach
verlässt die Lenkrakete die Mündung der Kanone und beginnt den
selbständigen Flug. In dem Moment, in dem die Lenkrakete in
das Sichtfeld 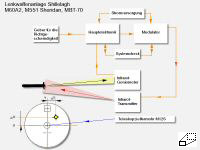 des
Zielfernrohres einfliegt, wird von einem Goniometer im Zielfernrohr
die Infrarotstrahlung einer Lichtquelle am Heck der Lenkrakete
empfangen. Dieses Goniometer ist eine winkelmessende, optoelektronische Baugruppe,
in der die Position eines Lichtpunktes in Bezug zum optischen
Mittelpunkt des Koordinatensystems des Goniometers ermittelt
und in äquivalente elektronische Signale umgewandelt wird. Die
Signale werden verstärkt, in lagebezogene Lenksignale umgerechnet
und anschließend moduliert. Diese modulierten Lenksignale werden
an die Transmittereinheit übertragen und durch diese über einen engen Infrarotstrahl
in Zielrichtung abgestrahlt. Dabei werden die Lenksignale für
jeweils Seiten- oder Höhenkorrekturen zeitlich gestaffelt nacheinander
ausgesendet. Diese Besonderheit
erlaubt es, ein gemeinsames Signalmedium für Seiten- oder Höhenkorrekturen zu benutzen.
Das vereinfacht insbesondere die Konstruktion
der Transmittereinheit (bei drahtgelenkten Systemen ist aus
diesem Grund die Verwendung eines lediglich zweiadrigen Lenkdrahtes möglich,
wodurch der Lenkdraht dünner wird und die Lenkdrahtspule in
der Rakete eine größerer Länge des Lenkdrahtes aufnehmen kann). des
Zielfernrohres einfliegt, wird von einem Goniometer im Zielfernrohr
die Infrarotstrahlung einer Lichtquelle am Heck der Lenkrakete
empfangen. Dieses Goniometer ist eine winkelmessende, optoelektronische Baugruppe,
in der die Position eines Lichtpunktes in Bezug zum optischen
Mittelpunkt des Koordinatensystems des Goniometers ermittelt
und in äquivalente elektronische Signale umgewandelt wird. Die
Signale werden verstärkt, in lagebezogene Lenksignale umgerechnet
und anschließend moduliert. Diese modulierten Lenksignale werden
an die Transmittereinheit übertragen und durch diese über einen engen Infrarotstrahl
in Zielrichtung abgestrahlt. Dabei werden die Lenksignale für
jeweils Seiten- oder Höhenkorrekturen zeitlich gestaffelt nacheinander
ausgesendet. Diese Besonderheit
erlaubt es, ein gemeinsames Signalmedium für Seiten- oder Höhenkorrekturen zu benutzen.
Das vereinfacht insbesondere die Konstruktion
der Transmittereinheit (bei drahtgelenkten Systemen ist aus
diesem Grund die Verwendung eines lediglich zweiadrigen Lenkdrahtes möglich,
wodurch der Lenkdraht dünner wird und die Lenkdrahtspule in
der Rakete eine größerer Länge des Lenkdrahtes aufnehmen kann).
Die Empfangseinheit im Heck
der Lenkrakete nimmt die modulierten Lenksignale auf und verstärkt
sie. Der Kreiselkoordinator ermittelt die Rollposition der sich
um ihre Längsachse drehenden Lenkrakete in Bezug zur fest bestimmten
Nullposition und gewährleistet dadurch, dass die Lenksignale
links/rechts bzw. hoch/tief immer nur in dem Moment an die Steuerruder
ausgegeben werden, wenn sich das entsprechende Ruderpaar in
der korrekten Position für links/rechts- bzw. hoch/tief- Korrekturen
befinden. Beim Lenkraketensystem
Shillelagh ist zusätzlich ein Geber für die Richtgeschwindigkeit
von Turm und Kanone eingebaut. Die gemessenen Richtgeschwindigkeiten beim
Begleiten eines beweglichen Zieles werden bei der Errechnung
der Lenksignale in der Steuerelektronik berücksichtigt und verringern
spürbar die Gefahr, dass die Lenkrakete durch systembedingt
unvermeidliche Übermittlungsverzögerungen bei der Signalübertragung
aus dem Bereich des signalübertragenden Infrarotstrahls herausdriftet
und verloren geht. Als Zielfernrohr nutzt der Richtschütze ein
besonderes Zielfernrohr oder das Hauptzielfernrohr, wenn die
Goniometereinrichtung in dieses integriert wurde.
1.2 SACLOS mit Laserkommandolenkung
Eine vergleichbares
Lenksystem wurde Mitte der 60er Jahre in Frankreich für die
experimentelle 142 mm Panzerkanone des AMX-30 erfolgreich
getestet. Der Hauptunterschied zur Shillelagh bestand prinzipiell
darin, dass die Lenksignale bei der ACRA über einen modulierten
Laserstrahl übertragen wurden. Die technische Möglichkeit, einen
Laserstrahl mit einer wesentlich höheren Frequenz bei nahezu
konstant hoher Ausgangsleistung pulsen zu lassen, erlaubte zusätzlich
die in Bezug zu vergleichbaren Systemen bisher unübertroffen
hohe Fluggeschwindigkeit der 142 mm Lenkrakete ACRA
von 550 m/s.
Ein Mangel beider Verfahren zur Lenksignalübertragung
ist die Empfindlichkeit gegenüber Sichtbehinderungen zwischen
Goniometer bzw. Signaltransmitter und der Lenkrakete. Werden
die Lenksignale zu stark und zu lange gedämpft, geht die Steuerung
der Rakete unweigerlich verloren.
1.3 SACLOS mit Funkkommandolenkung
In der Sowjetunion war fast zeitgleich begonnen
worden einen Panzer zu entwickeln, dessen Hauptbewaffnung nicht
mehr die Panzerkanone, sondern die Lenkrakete sein sollte. Aus
verschiedenen Gründen legten die sowjetischen Entwickler ihren
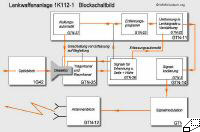 Schwerpunkt
auf die Verwendung der Funktelemetrie zur Lenksignalübertragung.
In den 60er Jahren wurden eine Reihe von Gefechtsfahrzeugen
mit Raketenbewaffnung entwickelt, deren Lenksysteme diese Technologie
nutzten. Alle diese Prototyten waren aber eigentlich schwergepanzerte
Raketenjagdpanzer. Den konventionellen Kampfpanzer mit seinem
breit
aufgefächerten Einsatzspektrum konnte keiner von ihnen ersetzen.
Nur der IT-1 auf der Basis des T-62 wurde in einer kleinen Serie
produziert und einem längeren Truppenversuch unterzogen. Das
entwickelte Funktelemetrie-Lenkverfahren findet sich Ende der
70er Jahre deutlich
verbessert bei der Lenkwaffenanlage 9K112 KOBRA wieder. Die beschriebenen
Grundprinzipien
des SACLOS-Verfahrens gelten auch beim System KOBRA, eine eingehende Beschreibung der gesamten Anlage
wird im Artikel zur Lenkwaffenanlage
9K112 KOBRA dargestellt. Schwerpunkt
auf die Verwendung der Funktelemetrie zur Lenksignalübertragung.
In den 60er Jahren wurden eine Reihe von Gefechtsfahrzeugen
mit Raketenbewaffnung entwickelt, deren Lenksysteme diese Technologie
nutzten. Alle diese Prototyten waren aber eigentlich schwergepanzerte
Raketenjagdpanzer. Den konventionellen Kampfpanzer mit seinem
breit
aufgefächerten Einsatzspektrum konnte keiner von ihnen ersetzen.
Nur der IT-1 auf der Basis des T-62 wurde in einer kleinen Serie
produziert und einem längeren Truppenversuch unterzogen. Das
entwickelte Funktelemetrie-Lenkverfahren findet sich Ende der
70er Jahre deutlich
verbessert bei der Lenkwaffenanlage 9K112 KOBRA wieder. Die beschriebenen
Grundprinzipien
des SACLOS-Verfahrens gelten auch beim System KOBRA, eine eingehende Beschreibung der gesamten Anlage
wird im Artikel zur Lenkwaffenanlage
9K112 KOBRA dargestellt.
Die Funktelemetrie hat den großen Vorteil, dass die Lenksignale
durch Sichtbehinderungen nicht beeinflusst werden können. In der Praxis
gilt das zumindest insofern, wie der Sichtkontakt über das Zielfernrohr
zum Ziel nicht völlig verloren geht. Eventuellen Funkstörungen
kann man in bestimmten Grenzen dadurch begegnen, dass die Frequenzen
und Kodierungen der Funksignale variantenreich gestaltet werden.
Der hohe technologische Aufwand schlägt sich jedoch in einem
komplizierten und voluminösen Aufbau des Gerätesatzes nieder. In
den T-64B und T-80B mit dem System KOBRA wird ein beachtlicher
Teil des knappen Kampfraumvolumens durch die erforderlichen
Elektronikbaugruppen der Lenkwaffenanlage eingenommen. Weil die Härtung gegenüber
dem elektromagnetischen Impuls EMP einer Kernwaffendetonation
für sowjetische Kampfpanzer eine Grundforderung war, griff man damals
auf die bewährte, aber wenig raumsparende Röhrentechnologie
zurück.
2. Beam Rider - Selbstorientierung am Leitstrahl
Die Selbstorientierung der Lenkrakete am
Laserstrahl ist im Vergleich zur Funkkommandosteuerung technologisch
wesentlich weniger aufwändig. Die Anzahl erforderlicher Baugruppen
verringert sich im Wesentlichen auf einen Hauptelektronikblock
und einen Lasertransmitter, der in das Zielfernrohr integriert
werden kann. Die Lenkwaffenanlage 9K116
und 9K119
sind bisher die  einzigen Beispiele für den erfolgreichen serienmäßigen
Einsatz
in einem Kampfpanzer. Eine ähnliche Einrichtung wird im russischen
Unterstützungspanzer BMPT mit der Lenkwaffenanlage 9M120 ATAKA
verwendet. Das Grundprinzip besteht darin, dass
der schießende Kampfpanzer ein enges Bündel modulierter und
kodierter Laserstrahlen in Zielrichtung aussendet, wobei die
Empfangs- und Elektronikeinheit der Lenkrakete dieses modulierte
und kodierte Strahlenbündel in ein polares Koordinatensystem
auflösen kann, dessen Koordinatenursprung sich mit der Visierlinie
deckt und somit die Berechnung der nötigen Lenkkorrekturen
zur Rückführung auf die Visierlinie gestattet. Das Kernproblem
dieses Verfahrens ist die Technologie zur Erzeugung des erforderlichen
Bündels von Laserstrahlen und die Einbettung der Koordinateninformationen
in die Modulation bzw. Kodierung der Laserstrahlen. einzigen Beispiele für den erfolgreichen serienmäßigen
Einsatz
in einem Kampfpanzer. Eine ähnliche Einrichtung wird im russischen
Unterstützungspanzer BMPT mit der Lenkwaffenanlage 9M120 ATAKA
verwendet. Das Grundprinzip besteht darin, dass
der schießende Kampfpanzer ein enges Bündel modulierter und
kodierter Laserstrahlen in Zielrichtung aussendet, wobei die
Empfangs- und Elektronikeinheit der Lenkrakete dieses modulierte
und kodierte Strahlenbündel in ein polares Koordinatensystem
auflösen kann, dessen Koordinatenursprung sich mit der Visierlinie
deckt und somit die Berechnung der nötigen Lenkkorrekturen
zur Rückführung auf die Visierlinie gestattet. Das Kernproblem
dieses Verfahrens ist die Technologie zur Erzeugung des erforderlichen
Bündels von Laserstrahlen und die Einbettung der Koordinateninformationen
in die Modulation bzw. Kodierung der Laserstrahlen.
2.1. Leitstrahl mit zwei modulierten
Laserstrahlen
Die beschriebene Einrichtung
besteht aus einem Laser, 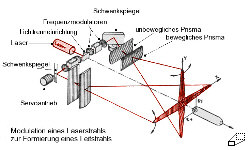 dessen
Laserstrahl durch einen Strahlenteiler in zwei unabhängige Teilstrahlen
zerlegt wird und aus je einer Modulationseinrichtung. Der erste
Teilstrahl des Hauptlasers passiert hinter dem optischen Strahlenteiler
den elektromechanischen Modulator für die Erzeugung des Leitstrahls
der Höhenkorrektur. Dem Modulator nachgeordnet ist ein oszillierender
Schwenkspiegel, mit dessen Hilfe durch
die erzeugte vertikale Schwingungsbewegung den Lenkkanal der
Höhe bildet wird. Der zweite Teilstrahl des Hauptlasers bildet bei
analoger Verfahrensweise den Lenkkanal der Seite. Die Modulation
des Laserstrahls in der Höhe wird ausgehend vom Koordinatenursprung
schrittweise (-yn...-y2,-y1,
y0, y1, y2,...yn)
in beide Richtungen so verändert, dass jede Frequenz einem festgelegten
Abstand zum Koordinatenursprung entspricht. Die Modulation des
Laserstrahls in der Seite erfolgt ausgehend vom Koordinatenursprung
(-xn...-x2,-x1 x0,
x1, x2,...xn) schrittweise
in analoger Weise. Dadurch bildet sich ein von der Empfangseinheit
der Lenkrakete lesbares Koordinatengitter im Raum. dessen
Laserstrahl durch einen Strahlenteiler in zwei unabhängige Teilstrahlen
zerlegt wird und aus je einer Modulationseinrichtung. Der erste
Teilstrahl des Hauptlasers passiert hinter dem optischen Strahlenteiler
den elektromechanischen Modulator für die Erzeugung des Leitstrahls
der Höhenkorrektur. Dem Modulator nachgeordnet ist ein oszillierender
Schwenkspiegel, mit dessen Hilfe durch
die erzeugte vertikale Schwingungsbewegung den Lenkkanal der
Höhe bildet wird. Der zweite Teilstrahl des Hauptlasers bildet bei
analoger Verfahrensweise den Lenkkanal der Seite. Die Modulation
des Laserstrahls in der Höhe wird ausgehend vom Koordinatenursprung
schrittweise (-yn...-y2,-y1,
y0, y1, y2,...yn)
in beide Richtungen so verändert, dass jede Frequenz einem festgelegten
Abstand zum Koordinatenursprung entspricht. Die Modulation des
Laserstrahls in der Seite erfolgt ausgehend vom Koordinatenursprung
(-xn...-x2,-x1 x0,
x1, x2,...xn) schrittweise
in analoger Weise. Dadurch bildet sich ein von der Empfangseinheit
der Lenkrakete lesbares Koordinatengitter im Raum.
 Die
Lenkrakete nimmt über die Fotoempfangseinheit am Heck die ausgesendete
Laserstrahlung auf. Nach Umformung des modulierten, kodierten
Laserstrahls in elektrische Signale und deren Verstärkung werden
die Signale demoduliert, dekodiert und in X- sowie Y-Positionsdaten
entsprechend der Position der Lenkrakete im Koordinatengitter
des Laserstrahls umgewandelt. Aus der Differenz zum Koordinatenursprung
berechnet die Steuerelektronik entsprechende Lenksignale. Der
Kreiselkoordinator gewährleistet, dass die Lenksignale für Höhe
und Seite nur bei entsprechender horizontaler bzw. vertikaler
Stellung der Ruder in Bezug zur Rolllage der Lenkrakete ausgegeben
werden. Dies ermöglicht zusätzlich auch die Reduzierung der
Steuerruder auf ein einziges Ruderpaar. Bei kurzzeitigem Ausfall des Laserleitstrahles ist die
Steuerelektronik in Verbindung mit dem Autopiloten in der Lage,
die Lenkrakete bis zum Wiedereinsetzen des Laserleitstrahles
auf Kurs zu halten. Dabei kann die Modulation bzw. Kodierung
des Laserleitstrahles sowohl analog oder digital erfolgen, wobei
die digitale Technologie eine deutlich verbesserte Störfestigkeit
und eine höhere Informationsdichte gewährleisten kann. Die
Lenkrakete nimmt über die Fotoempfangseinheit am Heck die ausgesendete
Laserstrahlung auf. Nach Umformung des modulierten, kodierten
Laserstrahls in elektrische Signale und deren Verstärkung werden
die Signale demoduliert, dekodiert und in X- sowie Y-Positionsdaten
entsprechend der Position der Lenkrakete im Koordinatengitter
des Laserstrahls umgewandelt. Aus der Differenz zum Koordinatenursprung
berechnet die Steuerelektronik entsprechende Lenksignale. Der
Kreiselkoordinator gewährleistet, dass die Lenksignale für Höhe
und Seite nur bei entsprechender horizontaler bzw. vertikaler
Stellung der Ruder in Bezug zur Rolllage der Lenkrakete ausgegeben
werden. Dies ermöglicht zusätzlich auch die Reduzierung der
Steuerruder auf ein einziges Ruderpaar. Bei kurzzeitigem Ausfall des Laserleitstrahles ist die
Steuerelektronik in Verbindung mit dem Autopiloten in der Lage,
die Lenkrakete bis zum Wiedereinsetzen des Laserleitstrahles
auf Kurs zu halten. Dabei kann die Modulation bzw. Kodierung
des Laserleitstrahles sowohl analog oder digital erfolgen, wobei
die digitale Technologie eine deutlich verbesserte Störfestigkeit
und eine höhere Informationsdichte gewährleisten kann.
2.2 Leitstrahl mit einem analog modulierten
Laserstrahl
Eine mögliche Methode für die
Frequenzmodulation des Leitstrahls wird in einem Patent der
deutschen Firma Eltro GmbH aus dem Jahre 1964 beschrieben.
Ein Laserstrahl trifft auf eine elektromechanische Modulationseinrichtung,
die aus einer kreisförmigen, um die eigenen Achse rotierenden
Schlitzmaske besteht.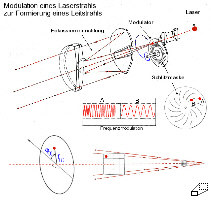 Zusätzlich
zur Eigenrotation bewegt sich die Drehachse der Schlitzmaske
in einer kreisförmigen, exzentrischen Bewegung um die Längsachse des Laserstrahls
herum. Die Schlitze der Schlitzmaske sind derart geformt, dass
die durch die rotierende Schlitzmaske hindurch leuchtende Laserstrahlung jeden einzelnen
Strahl des sich bildenden Strahlenbündels mit einer eindeutige
Signatur versehen wird. Jeder einzelne Teilstrahl unterscheidet sich
somit eindeutig durch die Frequenz und den
zeitabhängigen Phasenwinkel Phi. Zusätzlich
zur Eigenrotation bewegt sich die Drehachse der Schlitzmaske
in einer kreisförmigen, exzentrischen Bewegung um die Längsachse des Laserstrahls
herum. Die Schlitze der Schlitzmaske sind derart geformt, dass
die durch die rotierende Schlitzmaske hindurch leuchtende Laserstrahlung jeden einzelnen
Strahl des sich bildenden Strahlenbündels mit einer eindeutige
Signatur versehen wird. Jeder einzelne Teilstrahl unterscheidet sich
somit eindeutig durch die Frequenz und den
zeitabhängigen Phasenwinkel Phi.
Die modulierte Frequenz ist abhängig
von den Radien der Umlaufbewegungen für jeden einzelnen Punkt
auf der Schlitzscheibe und den Abstand jedes Lichtpunktes des
Laserstrahls von der Längsachse des Laserstrahls.
Eine Methode
zur möglichst präzisen Bestimmung des Phasenwinkels Phi
kann zum einen ein zweiter Laser sein,
der bei Erreichen eines bestimmten Null-Phasenwinkels Phi
ein Referenzsignal in der Art eines Leuchtturms
abstrahlt, der immer dann ein zusätzliches Lichtsignal aussendet,
wenn das Leuchtdrehfeuer die Nordrichtung bei 0 bzw.360 Grad
passiert. Zum zweiten kann dieses Referenzsignal in den Signalstrom
des Hauptlasers integriert werden, in dem beispielsweise bei
Durchlaufen des Phasenwinkels Null eine gesonderte Information beispielsweise
in Form einer modulierten, kurzzeitigen Signalunterbrechnung
eingefügt wird. Dieses Phase Null Signal kann mit Hilfe des
Zeit- und Taktgebers der Dekodiereinheit der Lenkrakete
in ein Signal mit der Größe des Phasenwinkels Phi
für jeden einzelnen Teilstrahl umgerechnet werden.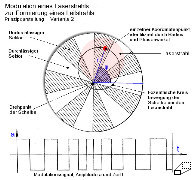
Eine
weitere mögliche Variante einer elektromechanischen Modulationseinrichtung
entsprechend eines Patentes der Firma Martin Marietta aus
dem Jahre 1979 zeigt das nächste Bild. Die Einrichtung
besteht gleichfalls aus einer kreisförmigen Modulationsmaske.
Die Scheibe dreht sich wie im vorigen Beispiel um ihre eigene
Achse und bewegt sich gleichzeitig mit ihrem Drehpunkt
in einer kreisförmigen, exzentrischen Bewegung um die Längsachse
des Laserstrahls herum. Die Scheibe ist in lichtdurchlässige
und undurchlässige Sektoren geteilt.
Jeder Teil des sich
bildenden Strahlenbündels kennzeichnet im Koordinatengitter
einen Punkt, der durch den Radius und den Phasenwinkel sowie
die charakteristische Frequenzmodulation eindeutig identifiziert
werden kann.
Eine
der Modulationseinrichtung nachgeordnete Fokussiereinheit weitet
den Laserstrahl soweit auf, dass ein Lenkkanal von einem Durchmesser
gebildet wird, der groß genug ist, dass alle denkbaren
Abweichungen der Lenkrakete von der Visierlinie innerhalb des
Lenkfeldes zuverlässig kompensiert werden können. Die tatsächliche
Größe ist vom Typ der Lenkrakete abhängig. Beispielsweise gibt
ein bekanntes Patent von Texas Instruments aus dem Jahre 1976
einen Durchmesser des Laserleitstrahles von 4,5 bis 6 Meter
bei einer Entfernung von 3000 Meter an.
2.3 Leitstrahl mit einem digital modulierten
Laserstrahl
Ein Laserstrahl trifft auf eine Modulationseinrichtung,
die aus zwei Schlitzmaskenscheiben besteht, von denen jede mit
einer Anzahl n von Schlitzmustern
versehen ist. Die Anzahl der Schlitzmuster ist abhängig von
der gewünschten Genauigkeit der Positionsbestimmung. Jede Schlitzmaskenscheibe weist linear angeordnete
Schlitzmuster auf, die in mehreren Reihen übereinander angeordnet
sind, wobei sich ein in sich  geschlossenes
Schlitzmaskenfeld bildet. Die Schlitzmaskenscheibe umfasst mehrere
dieser Schlitzmaskenfelder in untereinander angeordneten Reihen. Jedes einzelne Schlitzmuster
in den Schlitzmaskenfeldern der Schlitzmaskenscheiben stellt
einen eindeutigen digitalen Bit-Wert dar. geschlossenes
Schlitzmaskenfeld bildet. Die Schlitzmaskenscheibe umfasst mehrere
dieser Schlitzmaskenfelder in untereinander angeordneten Reihen. Jedes einzelne Schlitzmuster
in den Schlitzmaskenfeldern der Schlitzmaskenscheiben stellt
einen eindeutigen digitalen Bit-Wert dar.
Die beiden
Schlitzmaskenscheiben rotieren jede mit zueinander entgegengesetzter
Drehrichtung um ihre Achse, wobei sie sich im Bereich der Längsachse
des Laserstrahls überlappen. Die Achsen der beiden Schlitzmaskenscheiben
sind zueinander so angeordnet, dass die radial übereinander
angeordneten Reihen von Schlitzmustern der ersten Schlitzmaskenscheibe
beim Durchlauf durch den Laserstrahl eine horizontale Orientierung erhalten, während die Schlitzmuster
der zweiten Schlitzmaskenscheibe eine vertikale Orientierung
beim Durchlaufen des Laserstrahl erhalten, Die gestaffelte Anordnung der Schlitzmaskenfelder
auf dem Randstreifen jeder Schlitzmaskenscheibe gewährleistet, dass sich wechselweise entweder
ein Schlitzmaskenfeld der ersten Schlitzmaskenscheibe oder ein Schlitzmaskenfeld
der zweiten Schlitzmaskenscheibe im Lichtstrom des Laserstrahls
befindet. Auf diese Weise projiziert der Laser ein Gitter von
horizontal bzw. und vertikal ausgerichteten Bit-Musterstreifen
in den Lenkkanal, wobei diese Bit-Musterstreifen von der Sensoreinheit
der Lenkrakete aufgenommen werden und eine eindeutige Positionsbestimmung
der Lenkrakete in Bezug zum Koordinatenursprung dieses virtuellen,
digital kodierten
Koordinatengitters ermöglichen. Die elektronische Steuereinheit
der Lenkrakete errechnet aus diesen Werten die erforderlichen Lenkkorrekturen.
2.4 Fokussierung und Anhebung des Leitstrahles
Die
Formierung eines Lenkkanals mit Hilfe eines Laserstrahls direkt
in der Visierlinie führt zu einer Reihe von Nachteilen. Moderne
Kampfpanzer sind nicht selten mit Einrichtungen ausgestattet,
die eine Warnung ausgeben, wenn der Kampfpanzer vom Laserstrahl
eines Entfernungsmessers oder einem modulierten Laserstrahl
einer Lenkwaffenanlage getroffen wird. Die relativ langen Flugzeiten
der Lenkraketen erlauben ohne weiteres die Ergreifung geeigneter
Gegenmaßnahmen. Überdies können die Verbrennungsgase durch Rauch
und Hitzeflimmern die Sicht durch das Zielfernrohr beeinträchtigen.
Ebenso muss gewährleistet werden, dass der Lenkkanal über
die gesamte Entfernung die für die geforderte Genauigkeit erforderliche
Größe aufweist. Die nicht zu vermeidende Aufweitung eines Laserstrahls
ist insbesondere im Bereich des Endanfluges unerwünscht, wo ein
zu großer Durchmesser des Lenkfeldes die erforderliche besondere Präzision herabsetzen
würde.
 Die Fokussiereinrichtung gestattet es, den Durchmesser
des Lenkkanals über die gesamte Flugbahn in der erforderlichen Größe
konstant zu halten. Eine elektromechanisch angetriebene optische
Zoom-Linsengruppe wird von der Elektronik so gesteuert, dass
in Korrespondenz mit dem Messwert des Entfernungsmessers und
den in der Steuerelektronik auf einem Speicherchip gespeicherten
Flugzeiten der Lenkrakete (oder alternativ durch eine einfache
analog arbeitende Zeitsteuerung), der Durchmesser des Lenkkanals
kontinuierlich der verbleibenden Entfernung der Lenkrakete zum
Ziel angepasst wird. Bei einer Schussentfernung zwischen 1000
und 5000 Metern wird in einem weiteren vorliegenden Patent beispielsweise
ein Zoom-Verhältnis von 5:1 für erforderlich gehalten. Die Fokussiereinrichtung gestattet es, den Durchmesser
des Lenkkanals über die gesamte Flugbahn in der erforderlichen Größe
konstant zu halten. Eine elektromechanisch angetriebene optische
Zoom-Linsengruppe wird von der Elektronik so gesteuert, dass
in Korrespondenz mit dem Messwert des Entfernungsmessers und
den in der Steuerelektronik auf einem Speicherchip gespeicherten
Flugzeiten der Lenkrakete (oder alternativ durch eine einfache
analog arbeitende Zeitsteuerung), der Durchmesser des Lenkkanals
kontinuierlich der verbleibenden Entfernung der Lenkrakete zum
Ziel angepasst wird. Bei einer Schussentfernung zwischen 1000
und 5000 Metern wird in einem weiteren vorliegenden Patent beispielsweise
ein Zoom-Verhältnis von 5:1 für erforderlich gehalten.
Um zu
verhindern, dass der Leitstrahl während der gesamten Flugzeit
permanent auf dem Ziel liegt und um die Sicht zum Ziel nicht
übermäßig zu behindern, ist es zweckmäßig,
den Leitstrahl um wenigstens einige Meter über die Visierlinie
des verwendeten Zielfernrohres anzuheben. Die russische Lenkwaffenanlage
9K119 REFLEKS
verfügt beispielsweise über ein Hauptverfahren
"Schießen mit Überhöhung". Eine entsprechende technische
Lösung besteht darin, hinter die Modulationseinrichtung, aber
noch vor der Fokussiereinrichtung ein optisches Brechungsprisma
in der Laserstrahl zu legen. Dieses Prisma ist drehbar um die
Querachse
angeordnet. die sich auf Höhe der Längsachse des Laserstrahls befindet.
Eine Steuerelektronik gewährleistet die korrekte und gleitende
Verdrehung des Prismas in Abhängigkeit des gewählten Schießverfahrens
und abhängig vom Messwert des Entfernungsmessers. Dadurch fliegt die
Lenkrakete nach dem Verlassen der Rohrmündung bei einem Abflugwinkel
größer Null zuverlässig und frühzeitig in den Lenkkanal ein,
wird gleitend mit der erforderlichen Überhöhung über der Visierlinie
geführt und in einer Mindestentfernung für den präzisen Endanflug
wieder auf die Visierlinie abgesenkt. Die beschriebene Einrichtung
erlaubt zusätzlich die Nutzung des Lenkverfahrens "Schießen
ohne Überhöhung", was notfalls gestattet, ein Ziel auch bei
unbekannter Schussentfernung zu bekämpfen. In diesem Falle wird
die Lenkrakete sofort nach dem Verlassen der Rohrmündung so
weit abgesenkt, dass Lenkkanal und Visierlinie bis zum Ziel deckungsgleich
übereinander liegen. Dabei muss in Kauf genommen werden, dass der
Laserstrahl des Lenkkanals vom Ziel frühzeitig aufgeklärt wird.
Dieses zweite Lenkverfahren ist darum in den meisten Fällen
nur die Notbetriebsart.
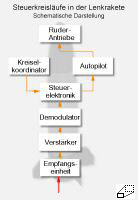
3. Laser Homing
Das Laser Homing Verfahren für rohrverschießbare
Lenkraketen stellt eine Modifizierung der bekannten Lenkmethode
für lasergelenkte Fliegerbomben dar, die bereits in den 70er
Jahren zum Einsatz kamen. Das Lenkverfahren wurde ab 1984 auch
für die 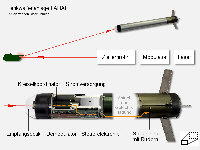 Panzerabwehrlenkrakete
AGM-114 Hellfire der Kampfhubschrauber Apache ausgewählt.
Das Laser Homing ist eines der einfachsten Lenkverfahren überhaupt.
Notwendig ist lediglich eine Einrichtung zur Markierung eines
Zieles durch einen modulierten Laserstrahl und eine Lenkrakete
mit einem Suchkopf, der die vom angestrahlten Ziel reflektierte,
modulierte Laserstrahlung erfassen und die Lenkrakete ins
Zentrum der Laserstrahlung steuern kann. Eine Modulierung des
Laserstrahls ist empfehlenswert, um Störstrahlungen auf dem Gefechtsfeld
wirksam auszufiltern und zu garantieren, dass von unterschiedlichen
Panzern unabhängig abgefeuerte Lenkraketen zuverlässig die korrekten
Ziele erfassen können. Ein Kreiselkoordinator in der Lenkrakete
vergleicht ständig die Rollposition der Rakete und regelt die
Ausgabe der Steuersignale so, dass die Ruderausschläge für Höhen-
und Seitenkorrekturen in den Momenten erfolgen, in denen sich
die entsprechenden Ruder in der richtigen Position befinden. Panzerabwehrlenkrakete
AGM-114 Hellfire der Kampfhubschrauber Apache ausgewählt.
Das Laser Homing ist eines der einfachsten Lenkverfahren überhaupt.
Notwendig ist lediglich eine Einrichtung zur Markierung eines
Zieles durch einen modulierten Laserstrahl und eine Lenkrakete
mit einem Suchkopf, der die vom angestrahlten Ziel reflektierte,
modulierte Laserstrahlung erfassen und die Lenkrakete ins
Zentrum der Laserstrahlung steuern kann. Eine Modulierung des
Laserstrahls ist empfehlenswert, um Störstrahlungen auf dem Gefechtsfeld
wirksam auszufiltern und zu garantieren, dass von unterschiedlichen
Panzern unabhängig abgefeuerte Lenkraketen zuverlässig die korrekten
Ziele erfassen können. Ein Kreiselkoordinator in der Lenkrakete
vergleicht ständig die Rollposition der Rakete und regelt die
Ausgabe der Steuersignale so, dass die Ruderausschläge für Höhen-
und Seitenkorrekturen in den Momenten erfolgen, in denen sich
die entsprechenden Ruder in der richtigen Position befinden.
Ein bemerkenswerter Vorteil dieser Technologie
ist die Vielfalt der Methoden beim Einsatz. Der Laser-Zielmarkierer
muss sich nicht mehr zwingend beim schießenden Waffensystem
befinden. Außerdem ist der Schießende nicht an eine optische
Direktsicht zum Ziel gebunden. Die Lenkrakete LAHAT kann bei
relativ großen Erhöhungswinkeln der Waffe abgefeuert werden
und beginnt die Selbststeuerung in dem Moment, in dem die Sucheinrichtung
der Lenkrakete die  vom
Ziel reflektierte Laserstrahlung erfassen kann. Der schießende
Panzer kann sich somit hinter natürlichen Geländehindernissen
befinden, während ein unabhängiger Zielbeleuchter das Ziel markiert.
Dies kann ein weiterer Panzer sein, aber auch ein Kampfflugzeug,
ein Hubschrauber oder eine Drohne. Allerdings sind diese Einsatzvarianten
weniger für den spontanen, kurzfristigen Einsatz geeignet. Denkbar
ist auch die Variante, dass ein Kampfpanzer das Ziel markiert
und das Luftfahrzeug die Lenkrakete abfeuert. Die LAHAT kann
sowohl gegen Bodenziele aller Art, als auch gegen tief fliegende,
relativ langsame Hubschrauber eingesetzt werden. vom
Ziel reflektierte Laserstrahlung erfassen kann. Der schießende
Panzer kann sich somit hinter natürlichen Geländehindernissen
befinden, während ein unabhängiger Zielbeleuchter das Ziel markiert.
Dies kann ein weiterer Panzer sein, aber auch ein Kampfflugzeug,
ein Hubschrauber oder eine Drohne. Allerdings sind diese Einsatzvarianten
weniger für den spontanen, kurzfristigen Einsatz geeignet. Denkbar
ist auch die Variante, dass ein Kampfpanzer das Ziel markiert
und das Luftfahrzeug die Lenkrakete abfeuert. Die LAHAT kann
sowohl gegen Bodenziele aller Art, als auch gegen tief fliegende,
relativ langsame Hubschrauber eingesetzt werden.
Ein Nachteil
des Laser Homing Verfahrens ist der Umstand, dass ein Ziel unmittelbar
und über einen längeren Zeitraum durch den Laserstrahl beleuchtet
wird und genügend Zeit für Abwehrmaßnahmen zur Verfügung steht.
Gerade moderne Kampfpanzer werden in der Regel mit entsprechenden
Laser-Sensoren ausgestattet, die verzugslos eine Warnung der
Besatzung ausgeben können. Die Fähigkeit zum massierte Einsatz
der LAHAT-Lenkrakete gegen angreifenden Kampfpanzer durch eine
verteidigende Panzereinheit ist auch davon abhängig, wie es
möglich ist, die Modulation der Laser der Einzelpanzer voneinander
abzugrenzen. Präzise Informationen sind zu den technischen Daten
der LAHAT bisher nicht zugänglich. Es ist allerdings zu vermuten,
dass der Einsatz der LAHAT viel mehr für ausgewählte Einzelziele
in Betracht gezogen werden soll.
Quellen:
- Russisches Patent "Lösung für
die Formierung von Lenkkommandos für eine rotierende,
auf einem Strahl fliegende Rakete und die Einrichtungen
zu ihrer Realisierung", KBP Tula,
Russland, 27.06.1998
- Russisches Patent "Optische Zieleinrichtung
für Systeme der Steuerung von Lenkgeschossen", KBP Tula,
Russland, 27.02.1999
- Russisches Patent "Optische
Zieleinrichtung für Systeme der Steuerung von Lenkgeschossen",
KBP Tula, Russland, 20.06.2002
- Europäisches Patent, "Mittels eines
Laser-Leitstrahles fernsteuerbares Projektil", DIEHL GmbH &
Co, Nürnberg, Deutschland, 18.10.1995
- United States Patent,
"Beamrider Guidance Technique Using Digital FM Coding", Martin
Marietta Corporation, Orlando, USA, 30.01.1979
- United States Patent,
"Laser Beam Transmitter System For Laser Beam Rider Guidance Systems",
Texas Instruments Inc.,Dallas,
USA, 16.04.1976
- United States Patent,
"Method And Apparatus For The Determination Of Coordinates", Eltro
GmbH, Heidelberg, 20.05.1964
- Kampffahrzeuge der
Uraler Waggonwerke - Panzer 1960-X, Media-Print, Russland,
Niznii Tagil, 2007
- Panzer
T-80B, Technische Beschreibung und Nutzungsanleitung, Militärverlag,
Moskau, 1984
- Analyse
der Mittel zur technischen Wartung von Lenkwaffenkomplexen der
Panzer, Lvovsker Institut der Landstreitkräfte,
Ukraine, ISSN
1997
|
)
)
)
)
)
)
)
)
)
)
)