|

|
Grundlagen der Stabilisierungssysteme
Schon
im zweiten Weltkrieges bauten die USA in einigen ihrer Panzer
serienmäßig einfache Stabilisierungsanlagen ein. In der Sowjetunion
wurde für die T-26 und BT ein Zielfernrohr mit Blickfeldstabilisierung
und Kreiselabfeuerung entwickelt. Das Bild links zeigt das Grundprinzip
des genannten Stabilisierungssystems der amerikanischen Panzer.
Diese Geräte arbeiteten jedoch noch nicht 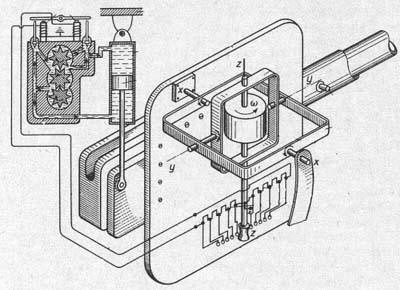 zufriedenstellend.
Der Krieg unterbrach zunächst die Entwicklungsarbeiten, der
Schwerpunkt lag auf der Massenproduktion billiger Kampfpanzer.
Nach dem Ende des Krieges begann man insbesondere in der Sowjetunion
intensiv moderne Stabilisierungsanlagen zu entwickeln und in
den 50er Jahren zuerst in den T-54
einzubauen. Auch für den britischen Centurion stand frühzeitig
ein zuverlässiger elektromechanischer Stabilisator der Firma
Metropolitan-Vickers zur Verfügung. In den USA entwickelte die
Firma Honeywell einen Stabilisator, der im M60 und auch im
Schweizer Panzer 68 Verwendung fand. 1964 stellte amerikanische
Firma
Cadillac Gage ihr verbessertes System Add-On vor, das dann 1969/70 auch
in den Leopard 1 integriert wurde. Während die Sowjetunion
auf ein zusätzliches Kraftrichtsystem verzichtete und die Kanonen
aller Panzer vom T-54 an ausschließlich mit Hilfe des Stabilisierungssystems
gerichtet wurden, setzte das System Add-On als Zusatz auf das
wesentlich früher entwickelte elektrohydraulische Kraftrichtsystem
auf. Beginnend mit dem T-64 trennte man die Stabilisierung von
Visierlinie und Waffen um die Treffgenauigkeit beim Schießen
aus der Bewegung wesentlich zu erhöhen. Das Stabilisierungssystem
des deutschen Leopard 2 stellte dann Anfang der 80er Jahre mit
seiner über viele Jahre unübertroffenen Stabilisierungsgüte
einen Meilenstein in der Entwicklung dieser Systeme dar. zufriedenstellend.
Der Krieg unterbrach zunächst die Entwicklungsarbeiten, der
Schwerpunkt lag auf der Massenproduktion billiger Kampfpanzer.
Nach dem Ende des Krieges begann man insbesondere in der Sowjetunion
intensiv moderne Stabilisierungsanlagen zu entwickeln und in
den 50er Jahren zuerst in den T-54
einzubauen. Auch für den britischen Centurion stand frühzeitig
ein zuverlässiger elektromechanischer Stabilisator der Firma
Metropolitan-Vickers zur Verfügung. In den USA entwickelte die
Firma Honeywell einen Stabilisator, der im M60 und auch im
Schweizer Panzer 68 Verwendung fand. 1964 stellte amerikanische
Firma
Cadillac Gage ihr verbessertes System Add-On vor, das dann 1969/70 auch
in den Leopard 1 integriert wurde. Während die Sowjetunion
auf ein zusätzliches Kraftrichtsystem verzichtete und die Kanonen
aller Panzer vom T-54 an ausschließlich mit Hilfe des Stabilisierungssystems
gerichtet wurden, setzte das System Add-On als Zusatz auf das
wesentlich früher entwickelte elektrohydraulische Kraftrichtsystem
auf. Beginnend mit dem T-64 trennte man die Stabilisierung von
Visierlinie und Waffen um die Treffgenauigkeit beim Schießen
aus der Bewegung wesentlich zu erhöhen. Das Stabilisierungssystem
des deutschen Leopard 2 stellte dann Anfang der 80er Jahre mit
seiner über viele Jahre unübertroffenen Stabilisierungsgüte
einen Meilenstein in der Entwicklung dieser Systeme dar.
International
haben sich zwei Grundverfahren der Waffenstabilisierung
herausgebildet. Die Stabilisatoren der Kampfpanzer der T-Serie
besitzen von Anfang an je zwei Kreisel für Seite und Höhe, also
Lagekreisel
und Wendekreisel,
deren Signale übereinandergelegt werden. Das System Honeywell
verwendete lediglich je einen Wendekreisel für Seite und Höhe
in einem Kreiselblock unter der Kanone. Die Stabilisierungsgüte
erreichte jedoch, besonders in schwerem Gelände, nicht die Qualität
der Systeme mit zwei Kreiseln je Ebene. Beim System Add-On verbesserte
man die Stabilisierungs weiter in dem man zusätzliche Wendekreisel,
von der Kanone räumlich getrennt, im Turm und in der Wanne einbaute,
um die Signale dann ebenfalls in der Stabilisierungselektronik
zu summieren.
Auch die Wege zur unabhängigen Stabilisierung
der Visierline unterscheiden sich von einander. Die T-Panzer
stabilisieren ab dem T-64 das Sichtfeld des Hauptzielfernrohres
rein mechanisch durch einen entsprechend großen Kreisel. Dies
ist sogar noch beim T-80 und T-90 der Fall, bei denen das System
so verfeinert wurde, dass die Visierlinie in beiden Ebenen stabilisiert
ist. Vorhalte sowie Erhöhungswinkel werden durch Ausschwenken
der Kanone aus der Visierline realisiert, also nachgeführt wie die Bewaffnung beim
Leopard 2. Diese sogenannte Waffennachführanlage des Leopard
2 folgt jedoch einem etwas anderen Prinzip. Der Ausblickkopf
des Hauptzielfernrohres besitzt faktisch ein eigenes elektromechanisches
Stabilisierungssystem mit einem Regelkreis aus Kreiseln und
Resolvern. Die Bewaffnung folgt, von der Elektronik gesteuert,
der Visierlinie nach. Dabei hat das Stabilisierungssystem des
Zielfernrohres Vorrang vor der Stabilisierung der Waffen.
Im
Folgenden einige Gedanken zu den Grundlagen der Stabilisierungssysteme.
Die Kenntnis der physikalischen Kräfte an technischen Kreiseln
wird vorausgesetzt. Die Beschreibungen stützen sich Anfangs
auf das russische Stabilisierungssystem, sind aber, was die
physikalischen Grundlagen betrifft, auf alle Systeme anwendbar.
Die Kreisel sind das Herzstück des Stabilisierungssystems.
Es sind technische Kreisel mit denen in Echtzeit die Abweichung der Kanone
in der vertikalen bzw. horizontalen Ebene gemessen werden kann.
Die benötigten Ausgangssignale sind die Winkelabweichung
und die Winkelgeschwindigkeit mit der die Abweichung erfolgt. Während
der Bewegung im Gelände kommt es durch Schwingungen um die Querachse
zu Kräften, die durch die technisch nicht vermeidbare Reibung
in den Schildzapfen der Waffenaufhängung auf die Kanone übertragen
werden. Die Kanone wandert aus ihrer Position aus. Lenkbewegungen
sowie Schwingungen um die Längsachse der Wanne führen zu Kräften,
die den Turm aus seiner Solllage bringen. Darüber hinaus sind
natürlich Kanone und Turm durch die Richtantriebe grundsätzlich
schon relativ fest an die Bewegungen der Wanne gekoppelt wodurch
sie den Bewegungen des Panzers folgen.
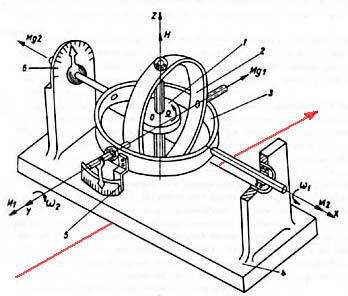 Das
linke Bild zeigt skizzenhaft einen Kreisel zur Messung der Winkelgröße
der Abweichung. Der Kreisel besitzt drei Freiheitsgrade. Man
bezeichnet ihn als Winkelgeber oder auch als Lagekreisel.
An der Achse des äußeren Kreiselrahmens wird an Stelle des Zeigers
ein Resolver
angebaut, der das mechanische Winkelsignal des Kreisels in ein
elektrisches umsetzt. Das
linke Bild zeigt skizzenhaft einen Kreisel zur Messung der Winkelgröße
der Abweichung. Der Kreisel besitzt drei Freiheitsgrade. Man
bezeichnet ihn als Winkelgeber oder auch als Lagekreisel.
An der Achse des äußeren Kreiselrahmens wird an Stelle des Zeigers
ein Resolver
angebaut, der das mechanische Winkelsignal des Kreisels in ein
elektrisches umsetzt.
Die Kreiseldrehzahl beträgt, bei den
russischen Systemen, cirka 26.000 upm, während die Kreiselachse
einem fiktiven Gewicht von bis zu 2 Kg standhält ohne auszuwandern.
Für den Vertikalstabilisator verläuft die Y-Achse in der
Skizze parallel zur Seelenachse (rot)
des Kanonenrohres. Wandert die Kanone um die X-Achse aus der
Solllage aus, dann behält der Kreisel seine Lage bei und verdreht
durch die Kreiselkräfte den Aufhängungsrahmen. Dabei dreht sich
der an der Achse des äußeren Kreiselrahmens befindliche Rotor
im Resolver. Dieser gibt ein der Winkelabweichung entsprechendes
elektrisches Signal ab.
Lagekreisel besitzen in der Regel ein
integriertes Korrektursystem zum Ausgleich technologisch
bedingter Fehlersignale. Durch nicht vermeidbare Reibung und
Fertigungstoleranzen in der Kardanaufhängung des Kreisels kommt
es nach kurzer Laufzeit zu Unwuchten im Kreisellauf. Dies führt
zum Auswandern der Kreiselrahmen aus der optimalen rechtwinkligen
Lage zueinander und damit zu einem Fehlersignal und im Resultat
zu einer Verschlechterung der Stabilisierungscharakteristik.
Gleichfalls kann es beim Schwenken des Turms und gleichzeitigen
Vorhandensein
eines Erhöhungswinkels der Kanone zu einer Komponente am inneren
Kreiselrahmen und zum nachfolgenden Auswandern des Kreisels
durch Präzession kommen.
Die Kreisel des Stabilisators 2E28M
des T-64/T-72 berücksichtigen beispielsweise einen Fehler in
der Rahmenausrichtung von höchstens 1 bis 2 Grad. Vergrößert
sich der Fehler, dann spricht der Elektromagnet der Korrektureinrichtung
an und führt die Kreiselrahmen wieder in die zueinander rechtwinklige
Lage zurück. Das System berücksichtigt darüber hinaus durch
die Stärke der einsetzenden Korrektur, ob der
Kreisel durch eine Geländeunebenheit auswandert oder ob der
Richtschütze den Turm horizontal richtet.
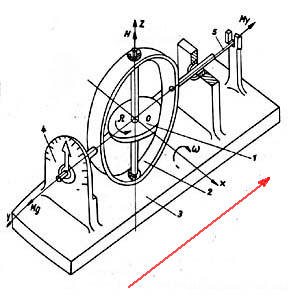 Eine
zweite wichtige Messgröße ist die absolute Winkelgeschwindigkeit mit
der die Kanone aus der Solllage auswandert. Diese Geschwindigkeit
wird von einem zweiten Kreiselsystem gemessen. Dieses System
ist ein Kreisel mit nur zwei Freiheitsgraden und einem Resolver
für die Signalumformung. Man bezeichten
ihn als Winkelgeschwindigkeitsgeber oder auch Wendekreisel.
Für den Vertikalstabilisator verläuft die Y-Achse in der linken
Skizze parallel zur Seelenachse (rot)
des Kanonenrohres. Eine Besonderheit bei diesem Kreisel
ist, das die Y-Achse in einem Drehstab ausläuft, der einseitig
fest mit dem Kreiselgehäuse verbunden ist. Dadurch wird der
Kreisel beim Auswandern der Kanone aus der Solllage um die X-Achse
an der freien Verdrehung des Rahmens gehindert. Die Kreiselkräfte,
durch die Anordnung der Kreiselachse sind es Präzessionskräfte,
verdrehen den Drehstab. Um störende Eigenschwingungen am Wendekreisel
zu dämpfen, wird in der Regel das Schwingungsverhalten durch
Wirbelstrombremsen oder ähnlich geeignete technische Maßnahmen
am freien Ende des Drehstabes gedämpft. Am Resolver entsteht
letztlich als Äquivalent zu den Torsionskräften am Drehstab
ein Signal für die Größe der Winkelgeschwindigkeit. Wenn durch
das einsetzende Stabilisierungsmoment das Auswandern der Kanone
gestoppt wurde und die Kanone wieder auf die Solllage zurückzuschwingen
beginnt, schlägt der Winkelgeschwindigkeitsgeber in die entgegengesetzte
Richtung aus. Der Resolver gibt nun, in Bezug auf das vorherige
Signal, ein negatives Signal aus, während das Signal des Winkelgebers
noch ein positives Vorzeichen hat. Eine Besonderheit der amerikanischen
Systeme Honeywell und Add-On ist, das nur Wendekreisel eingesetzt wurden.
Dabei befand sich beim System Add-On, beispielsweise für das vertikale Stabilisierungssystem,
ein Wendekreisel unmittelbar an der Kanone (Waffenkreisel) und ein zusätzlicher
Wendekreisel abgesetzt im Turm (Turmkreisel). Die Größe der
Winkelabweichung von der Solllage kann aus der Torsionskraft
am Drehstab ermittelt werden. Eine
zweite wichtige Messgröße ist die absolute Winkelgeschwindigkeit mit
der die Kanone aus der Solllage auswandert. Diese Geschwindigkeit
wird von einem zweiten Kreiselsystem gemessen. Dieses System
ist ein Kreisel mit nur zwei Freiheitsgraden und einem Resolver
für die Signalumformung. Man bezeichten
ihn als Winkelgeschwindigkeitsgeber oder auch Wendekreisel.
Für den Vertikalstabilisator verläuft die Y-Achse in der linken
Skizze parallel zur Seelenachse (rot)
des Kanonenrohres. Eine Besonderheit bei diesem Kreisel
ist, das die Y-Achse in einem Drehstab ausläuft, der einseitig
fest mit dem Kreiselgehäuse verbunden ist. Dadurch wird der
Kreisel beim Auswandern der Kanone aus der Solllage um die X-Achse
an der freien Verdrehung des Rahmens gehindert. Die Kreiselkräfte,
durch die Anordnung der Kreiselachse sind es Präzessionskräfte,
verdrehen den Drehstab. Um störende Eigenschwingungen am Wendekreisel
zu dämpfen, wird in der Regel das Schwingungsverhalten durch
Wirbelstrombremsen oder ähnlich geeignete technische Maßnahmen
am freien Ende des Drehstabes gedämpft. Am Resolver entsteht
letztlich als Äquivalent zu den Torsionskräften am Drehstab
ein Signal für die Größe der Winkelgeschwindigkeit. Wenn durch
das einsetzende Stabilisierungsmoment das Auswandern der Kanone
gestoppt wurde und die Kanone wieder auf die Solllage zurückzuschwingen
beginnt, schlägt der Winkelgeschwindigkeitsgeber in die entgegengesetzte
Richtung aus. Der Resolver gibt nun, in Bezug auf das vorherige
Signal, ein negatives Signal aus, während das Signal des Winkelgebers
noch ein positives Vorzeichen hat. Eine Besonderheit der amerikanischen
Systeme Honeywell und Add-On ist, das nur Wendekreisel eingesetzt wurden.
Dabei befand sich beim System Add-On, beispielsweise für das vertikale Stabilisierungssystem,
ein Wendekreisel unmittelbar an der Kanone (Waffenkreisel) und ein zusätzlicher
Wendekreisel abgesetzt im Turm (Turmkreisel). Die Größe der
Winkelabweichung von der Solllage kann aus der Torsionskraft
am Drehstab ermittelt werden.
Weitere Signalgeber können Werte für
die Verkantung der Schildzapfen der Kanone und für die lineare
Beschleunigungen in der horizontalen Ebene des Turmes bei Verkantung
der Wanne bzw. beim Schwenken des Turms geben. Diese Geber basieren
in der Regel auch auf den Kreiseln mit zwei Freiheitsgraden
mit entsprechenden Resolvern.
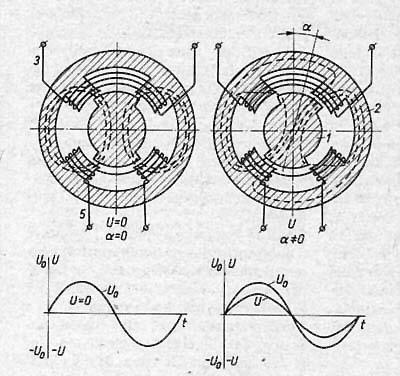 Resolver
sind auch als Drehmelder bekannt. Das linke Bild zeigt nun das
Prinzip eines solchen Resolvers. Resolver
sind auch als Drehmelder bekannt. Das linke Bild zeigt nun das
Prinzip eines solchen Resolvers.
Der Rotor in der Mitte befindet
sich auf der äußersten Achse des Kreiselrahmens. Der außen angeordnete
Stator besitzt Spulen, an denen eine über einen Umformer aus
dem 24 Volt Bordnetz transformierte Spannung von etwa 40 Volt bei 400
- 500 Herz anliegt. Das sich bildende Magnetfeld durchfließt
infolge der Anordnung der Spulen auch den Rotor. Befindet sich
der Rotor in der Solllage, dann ist die Ausgangsspannung konstant. Beim
Verdrehen des Rotors ändert sich die Spannung an den Statorspulen.
Die Ausgangsspannung des Resolvers entspricht dem Maß der absoluten
Winkelgeschwindigkeit und in der Phasenlage dem Richtungsvektor
der Bewegung der Kanone im Raum. Kommt es nun zum Auswandern der Kanone aus der Solllage, entsteht
im Resolver noch vor dem Signal der Winkelabweichung ein Signal der Winkelgeschwindigkeit.
Beide Signale, der Winkel der Regelabweichung
und das Signal der absoluten Winkelgeschwindigkeit während der
Abweichung, werden an den Elektronikblock übergeben und dort
weiterverarbeitet. Die Signale werden verstärkt und zu einem
Summierungssignal zusammengeführt. Das weiter verstärkte Summierungssignal
wird an die Stellglieder des Stabilisierungssystems weitergeleitet.
Im Diagramm wird veranschaulicht, welchen Verlauf die Signale
nehmen. Das Summierungssignal ist, da es dem Fehlersignal entgegenwirkt,
für eine bessere Anschaulichkeit mit entgegengesetztem Vorzeichen
versehen.
Wandert die Kanone an einem Hinderniss aus der
Solllage aus (A), entsteht sofort eine maximale Winkelgeschwindigkeit,
der Fehlerwinkel nimmt kontinuierlich zu. Das entstehende Summierungssignal
beginnt gleichzeitig dem Auswandern entgegen zu wirken. Mit
zunehmendem Fehler verstärkt sich das Summierungssignal. Wenn
das Auswandern der Kanone gestoppt ist (B-C), beginnt
die Rückführung der Kanone auf die Solllage (C). Dabei
ändert sich die Bewegungsrichtung der Kanone und folglich die Winkelgeschwindigkeit ihr Vorzeichen. Dies führt zu
einem abnehmenden Summierungssignal, was zusätzlich die Schwingung der
Kanone dämpft (D). Bedingt durch die Masseträgheit
schwingt die Kanone über die Sollage hinaus (E) und der
Regelkreislauf des Stabilisators arbeitet die umgekehrten Signale
der Kreisel bei zunehmender Dämpfung der Schwingung weiter ab
(F - G), bis die Kanone sich im Bereich der Solllage
befindet (H).
Eines der wesentliches Kriterium
der Arbeit des Stabilisators ist dabei die Anzahl der notwendigen
Schwingungen bis zum Einschwingen in die Solllage, die sogenannte
Dämpfung. Die Anzahl der Schwingungen bis zum Erreichen der
Solllage darf nicht zu groß sein, sonst wird der Stabilisator
zu "weich". Ist die Anzahl der Schwingungen zu gering
eingestellt, kann das zum Aufschaukeln und ungeregelten Vibrieren des Stabilisators
führen. Neben der Dämpfung müssen weitere Parameter für den
fehlerfreien Betrieb des Stabilisierungssystems eingehalten
werden. Das sind der Rohrausgleich für das Gleichgewicht zwischen
Rohrmündung und Bodenstück, das Reibmoment in den Richtantrieben
und Lagerungen, die Starrheit als Ausdruck des entwickelten Stabilisierungsmomentes
und weitere Parameter entsprechend der konstruktiven Besonderheiten
der einzelnen Typen.
Das Richten der Bewaffnung.
Neben der Grundfunktion des Stabilisierens
der Lage der Waffe im Raum muss es dem Richtschützen möglich
sein, die Waffen präzise auf ein Ziel zu richten. Dazu werden
verschiedene Verfahren angewendet. Die russischen Stabilisierungssysteme,
die ja keine autonomen Kraftrichtanlagen besitzen, nutzen hier
wieder das Prinzip der geregelten Präzession der Lagekreisel.
An der kardanischen Aufhängung der Lagekreisel mit drei Freiheitsgraden
befinden sich sogenannte Richtmagnete. Diese Elektromagnete
werden direkt angesteuert durch die Signale der Potentiometer
in den Richtgriffen. Die Elektromagnete erzeugen ein Moment
das dem Winkel der Verdrehung der Richtgriffe entspricht. Der
Kreiselrahmen präzediert mit genau dem Winkel der dem Moment
des Richtmagneten entspricht. Dabei dreht sich der Rotor im
Resolver, als ob eine Lageabweichung der Kanone bzw. des Turmes
entstanden wäre. Das Stabilisierungssystem beginnt sofort mit
der Richtgeschwindigkeit nachzuregeln, die durch die Richtgriffe
und dem Moment der Richtmagnete vorgegeben wurde. Werden die
Richtgriffe in die neutrale Position zurückgeführt, bleibt die
Waffe in der neuen Solllage stehen und wird weiter stabilisiert.
In
den Systemen von Honeywell oder Cadillac-Gage mit einem autonomen
Kraftrichtsystem wird beim Verdrehen der Richtgriffe ein elektrisches
Signal erzeugt, dass die Signalausgabe aus der Stabilisierungselektronik
an die Stellglieder für den Zeitraum des Richtens überlagert.
Der Stabilisator wird faktisch beim Richten "überfahren".
Bei den modernen Waffennachführanlagen, die des Leopard 2
basiert ja auf dem System Add-On, werden beim Verdrehen der
Richtgriffe elektrische Signale an die Kreisel der Kopfspiegelstabilisierung
angelegt und dadurch die Solllage auf eine neue Position gebracht.
Die Stabilisierungselektronik führt die Waffenanlage auf diese
neue Solllage nach.
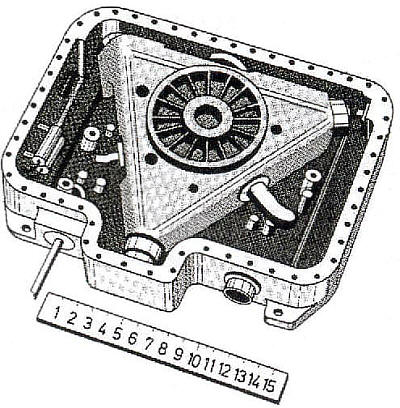
Der Laser-Kreisel.
Die beschriebenen Mängel
des traditionellen mechanischen Kreisels, wie lange Anlaufzeit
und die Neigung zum Auswandern, treten in den zunehmend Verwendung
findenden Laser-Kreiseln oder auch Ring-Kreiseln nicht auf. Laser-Kreisel sind mit dem
Moment des Einschaltens sofort einsatzbereit und können nicht
auswandern. Zusätzlich sind sie im Gegensatz zu den mechanischen
Kreiseln mechanisch äußerst robust und nahezu wartungsfrei.
Das linke Bild zeigt einen solchen Laser-Kreisel der Firma
Honeywell.
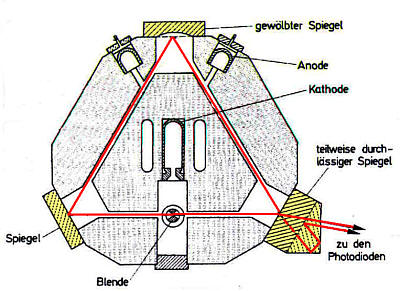
In diesem System werden
kontinuierlich zwei gegenläufige Laserstrahl (rot) erzeugt.
Durch eine spezielle Anordnung von Spiegeln (gelb) wird erreicht,
das sich die Laser-Strahlen permanent kreisförmig innerhalb
der Spiegel bewegen. Die Laser-Strahlen umlaufen mehrfach den
Weg zwischen den Spiegeln und werden dabei immer "länger",
bis sich die einzelnen Strahlen überlagern. Da sich Lichtstrahlen
Wellenähnlich verhalten, kommt es bei der Überlagerung zur Resonanzverstärkung
bzw. zu Interferenzlöschungen. Wegen des geschlossenen Kreislaufes
hebt sich durch die Resonanzverstärkung letztlich eine, messbare,
Frequenz heraus. Wird nun der Kreiselblock verdreht, so muss
der Laserstrahl der sich gerade in der Drehrichtung bewegt,
einen "längeren" Weg als der andere Strahl zurücklegen.
Durch die in diesem Moment wirkenden Effekte (Resonanz und Interferenz)
ergibt sich ein Unterschied in der Frequenz der beiden Laser-Strahlen.
Dieser Frequenzunterschied ist messbar und wird als Ausgangssignal
des Laser-Kreisels herangezogen.
|