|
Inhalt: |
2E28M
|
||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
Waffenstabilisator 2E28M "Siren" für die Kampfpanzer T-64 und T-72 Part 1 Part 2 Im Verlauf der Entwicklungsarbeiten für einen neuen sowjetischen Kampfpanzer neuerer Generation war den Konstrukteuren klar geworden, das ein Entfernungsmesser für den zukünftigen Standardpanzer zwingend erforderlich sein würde. Schon 1958 wurde der Prototyp Objekt 430, ein Urvater des T-64, mit dem optischen Entfernungsmesser TPD-43 ausgestattet, eine Lösung mit unabhängiger Stabilisierung von Zielfernrohr und Kanone. Ab Mitte der 60er Jahre stand dann der Zielfernrohrentfernungsmesser TPD-2-49 mit unabhängig stabilisiertem Sichtfeld in der Vertikalen zur Verfügung und wurde mit Beginn der Serienproduktion das Zielfernrohr des Kampfpanzers T-64. Der für den TPD-2-1 weiter entwickelte Waffenstabilisator erhielt die Bezeichnung 2E23. Nach einigen Verbesserungen ging aus diesen Systemen Anfang der 70er Jahre das Zielfernrohr TPD-2-49 und der Stabilisator 2E28 "Flieder" hervor, welche in verschiedenen Modifikationen im T-64, T-72 und anfänglich auch im T-80 Verwendung fanden. Der Stabilisator
2E28M ist ein elektrohydraulisches Stabilisierungssystem. Das
funktionelle Grundpinzip basiert auf dem Stabilisator STP-2.
Jedoch wurde der Kreiselblock des
Winkelgebers für die Vertikale aus dem gemeinsamen Kreiselblock
unter dem Bodenstück der Kanone herausgenommen und in das Zielfernrohrgehäuse
integriert. Das Seitenrichtgetriebe wird von einem Hydraulikmotor
großen Drehmoments angetrieben. Das Stabilisierungssystem synchronisiert
die Kanone nach dem Laden automatisch mit der Visierlinie. Ein
Druckspeicher ist nicht vorhanden, die Hydraulikpumpen arbeiten
kontinuierlich. Ein unstabilisiertes Kraftrichten ist in de
Horizontalen möglich, in der
Vertikalen ist dies nicht vorgesehen. Die Stabilisierungsanlage 2E42 ermöglicht die folgenden Betriebsarten a) Betriebart
Automatik: die volle Stabilisierung
in Höhe und Seite bei stabilisierter Visierlinie Zusätzliche Funktionen: a)
Ladewinkel: der Ladewinkel wird bei Auslösen des Ladevorganges
automatisch eingenommen, die Kanone wird hydraulisch in der
Vertikalen gezurrt und nach Abschluss des Ladevorganges wieder
stabilisiert und mit der Visierlinie synchronisiert
In der folgenden Tabelle sind die Hauptkennwerte des Systems aufgeführt:
Die Baugruppen
im Turm sind der Hydraulikverstärker für das vertikale Richten
(1), der Kreiselblock (2), der Höhenrichtzylinder
(3), das Einstellgerät für den vertikalen Winkel (4),
die Handhöhenrichtmaschine (5), die Winkelbegrenzer (6),
der Verteilerkasten K1 (7), der Geber der linearen Beschleunigung
(8), der Nachfüllbehälter für das vertikale Stabilisieren
(9), der Frequenzstabilisator (10) und in der
Wanne der Hydraulikmotor großen Drehmoments (11), die
Hydraulikpumpe (12) und der Nachfüllbehälter für das
horizontale Stabilisieren (12), sowie nicht dargestellt
der Zielfernrohr-Entfernungsmesser TPD mit der Blickfeldstabilisierung. Die Stabilisierung der
Visierlinie erfolgt mechanisch. Dazu befindet sich im Gehäuseblock
des Zielfernrohres ein Kreisel in drei Freiheitsgraden für die
Ermittlung der Größe der Winkelabweichung in der Vertikalen.
Der Kreisel ermittelt, gemeinsam mit dem Winkelgeschwindigkeitsgeber
im Kreiselblock unter der Kanone, die zur vertikalenStabilisierung
der Kanone notwendigen Signale. Gleichzeitig ist die kardanische
Aufhängung des Kreisels im Zielfernrohr über ein Stahlband und
ein Parallelogrammgestänge mit dem Kopfspiegel verbunden. Dieser
Kreisel besitzt eine so große Starrheit, dass er einem angehängten
Gewicht von 12 Kg widerstehen kann. Dadurch wird der Spiegelkopf
lediglich durch die Kraft des Kreisels stabilisiert. Diese Lösung
erwies sich als ausgesprochen robust und war so erfolgreich,
dass dieses Prinzip noch beim Zielfernrohr 1G46 des T-90 zum
Einsatz kam. Zum Richten
des Kopfspiegels werden durch Verdrehen der Richtgriffe
die Richtmagnete an der kardanische Aufhängung angesprochen,
die dadurch den Kreisel zu einer gesteuerten Präzession und
damit zum gesteuerten Auswandern anregen. Der mechanisch angeschlossene
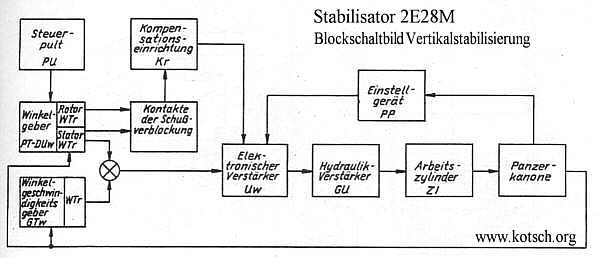
Spiegel folgt der Lageänderung des kardanischen Rahmens. Zum Ausgleichen systembedingter Kennlinienasymetrien und Abweichungen von Winkelgeber und Winkelgeschwindigkeitsgeber sowie durch verschleißbedingte Änderungen der Kenndaten der Baugruppen wurde zusätzlich eine Kompensationseinrichtung entwickelt. Die entstehende Abweichung von Visierlinie und Seelenachse der Kanone wird von der Kompensationseinrichtung gemessen und als Korrektursignal an die Stabilisierungselektronik ausgegeben. Die Kompensationseinrichtung besteht aus einer speziellen elektromechanischen Kontaktbaugruppe und ist mit dem kardanischen Rahmen des Kreisels verbunden. Bei Abweichungen die nicht im Toleranzfeld liegen, werden die entsprechenden Kontaktpaare geschlossen und ein Korrektursignal ausgegeben, bis Visierlinie und Seelenachse wieder synchron verlaufen. Die Kompensationseinrichtung wirkt gleichzeitig als Schußverblockung die den Abfeuerungstromkreis nur bei Synchronverlauf freischaltet. Das Richten der Kanone
wird wie folgt realisiert. Beim Richten des Spiegelkopfes verdreht
sich der äußere kardanische Rahmen des Kreisels und mit ihm
der Rotor des Resolvers, dadurch entsteht ein Fehlerwinkelsignal,
das an die Stabilisierungselektronik ausgegeben wird, die Kanone
folgt der Visierlinie bis die neue Solllage erreicht ist.
Zum Schutz der Kanone bei übergroßen
Störungen mit Winkelgeschwindigkeiten von mehr als 8 Grad/sec
verhindern die Kontakte der absoluten Geschwindigkeit,
befestigt am Kardanrahmen, das Anschlagen der Kanone an der
Widerlagern. Die Kanone wird in diesen Fällen hydraulisch gezurrt,
bis die Winkelgeschwindigkeiten auf weniger als 7,5 Grad/sec sinkt.
Part 1 Part 2 |
||||||||||||||||||||||
|
|
|
)
)