|
Inhalt: |
2E42
|
||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
Waffenstabilisator 2E42 für die Kampfpanzer T-72B, T-80U/UD und T-90 Im Zuge der Modernisierung und Weiterentwicklung der Kampfpanzer der Baureihe T-72 wurde ebenfalls der Verbesserung der Waffenstabilisierungsanlage großes Augenmerk geschenkt. Ende der 70-er Jahre begannen die Entwicklungsarbeiten am Nachfolger der Stabilisierungsanlage 2E28M. Bereits im Jahr 1984 lief mit der Modernisierungsstufe T-72B auch die Serienfertigung der neuen Stabilisierungsanlage 2E42 an. Sie wurde in der Folge auch in die Kampfpanzer T-80U/UD und T-90 eingebaut. Bei
der Stabilisierungsanlage 2E42 handelt es sich um eine kombinierte Anlage mit dem
bekannten hydraulischen Antrieb der Vertikalstabilisierung der
Kanone und einer elektromechanischen Richtanlage für das
Schwenken des Turms wie sie bereits bei den T-55 und T-62 Verwendung
gefunden hatte. Von der Rückkehr zu den inzwischen weiter verbesserten
Amplidynegeneratoren, auch als Elektromaschinenverstärker bezeichnet,
versprach man sich bessere Nutzungseigenschaften wie die sehr
kurzen Reaktionszeiten, die große Leistungverstärkung bei geringer
Eingangsleistung und nicht zuletzt auch die Erhöhung
der Überlebensfähigkeit der Besatzung und des Kampfpanzers.
Letzteres ist dem Umstand geschuldet, dass bei einem Treffer in die
Hydraulikanlage dessen Öl unter hohem Druck in den Kampfraum
versprüht wird und sich dabei ein hochexplosives Aerosol bildet.
Außerdem sind Hydraulikanlagen deutlich wartungsintensiver. Der
Grundaufbau des Stabilisators
2E42 entspricht im Wesentlichen dem des Stabilisators
2E28M.
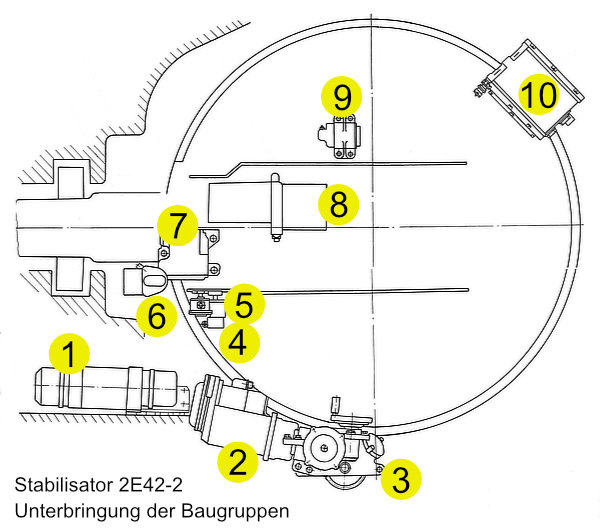
Die Visierlinie ist bei der 2E42-2 in der Vertikalen unabhängig
stabilisiert, die Kanone wird dieser Visierlinie nachgeführt.
Erst in der Modifikation 2E42-4 bei Einbau des Zielfernrohres
1G46 werden Turm und Kanone der Visierlinie in beiden Ebenen
nachgeführt. Bei der Anlage 2E42-2 befinden sich im Gehäuse des
Zielfernrohres TPD-K1 der Kreiselgeber für die Winkelabweichung
in der Vertikalen und im Kreiselblock unterhalb der Kanonenwiege der
Kreiselgeber für die Winkelabweichung in der Horizontalen sowie
der Kreiselgeber für die Winkelgeschwindigkeit in der Vertikalen.
Unterhalb der Kanonenwiege und nahe des Turmdrehkranzes befindet sich der Kreiselblock (7). Der Hydraulikverstärker für das vertikale Stabilisieren (8) befindet ich gleich hinter dem Kreiselblock ebenfalls an der Unterseite der Kanonenwiege. Der Geber der linearen Beschleunigung (9) befindet sich innen an der Turmdecke vor der Kommandantenkuppel. Hinter dem Kommandantensitz an der Turminnenwand hängt der Hauptverteilerkasten K1 (10). Nicht dargestellt sind der Verteilerkasten K2, der Spannungsumformer und der Frequenzstabilisator.
Die Stabilisierungsanlage 2E42 ermöglicht die folgenden Betriebsarten: a) Betriebart
Automatik: die volle Stabilisierung
in Höhe und Seite bei stabilisierter Visierlinie Zusätzliche Funktionen: a)
Ladewinkel: der Ladewinkel wird bei Auslösen des Ladevorganges
automatisch eingenommen, die Kanone wird hydraulisch in der
Vertikalen gezurrt und nach Abschluss des Ladevorganges wieder
stabilisiert und mit der Visierlinie synchronisiert Das Funktionsschaltbild zeigt in den wesentlichen Grundzügen die Funktion der Stabilisierungsanlage 2E42. In der vertikalen Ebene ermittelt der Winkelgeberkreisel im Zielfernrohr bei Auftreten einer Störung von Außen die Abweichung zwischen Visierlinie und Solllage der Kanone. Gleichzeitig ermittelt der Winkelgeschwindigkeitsgeber im Kreiselblock die Geschwindigkeit der Zunahme der Störung. Beide Werte werden im Summator zu einem gemeinsamen elektrischen Wert umgeformt und im nachfolgenden Verstärker verstärkt, so dass dessen Ausgangssignal die elektromagnetische Ventilsteuerung des Hydraulikzylinders der Vertikalstabilisierung ansteuern kann um die Kanone wieder in die Sollage zurück zu führen. Zum Schutz der Wiegenlager der Kanone und der Hydraulikanlage bei übergroßen Störungen mit Winkelgeschwindigkeiten von mehr als 8 Grad/sec verhindert der Winkelbegrenzer, befestigt beim Zahnbogen der manuellen Richtmaschine, das harte Anschlagen der Kanone an der Widerlagern. Die Kanone wird in diesen Fällen abgebremst und gegebenfalls hydraulisch gezurrt, bis die Winkelgeschwindigkeiten auf weniger als 7,5 Grad/sec sinkt. Der Winkelbegrenzer schaltet den Vertikalstabilisator um, wenn die Kanone den minimalen oder maximalen Erhöhungswinkel erreicht. Da der Richtbereich des Spiegelkopfes wesentlich größer ist als der Schwenkbereich der Kanone, würde es zu einer starken Belastung des Elektromotors des Hydraulikverstärkers kommen. Beim Ansprechen des Winkelbegrenzers wird der Stromfluß durch den Elektromotor um die Hälfte reduziert und der Motor entlastet. Nach Erreichen der Anschläge bis zum Eintreten der Rückführung der Kanone in die Solllage bleibt die Kanone hydraulisch gezurrt. In gleicher Weise wird die Kanone beim Auslösen des Ladevorgangs in den Ladewinkel geführt, bis zum Abschluss hydraulisch und mechanisch gezurrt und nach Abschluss des Ladevorganges in die Sollage zurückgeführt. Eine Kompensationseinrichtung im Zielfernrohrgehäuse stellt das systembedingte Auswandern der Kreiselachsen um mehr als 3 Grad aus ihrer normalen Betriebslage infolge systembedingter Kreiseleigenschaften, Lagerreibung, Verschleiß u.a. fest und sorgt durch Signalausgabe an elektrische Korrekturmotoren dafür, dass die Kreiselachsen ununterbrochen im korrekter Position zueinander gehalten werden.
Die Stabilisierung des Turmes in der horizontalen Ebene erfolgt grundsätzlich in analoger Weise. Jedoch steht nur das Ausgangssignal des Winkelgeberkreisels im Kreiselblock unter der Kanonenwiege zur Verfügung, die Winkelgeschwindigkeit ermittelt ein Integrator parallel aus dem Signalverlauf des Winkelgebes. Ein zusätzlicher Geber der linearen Beschleunigung misst die Beschleunigungskräfte in der Ebene des Turmkranzes die durch die Turmstellung in Bezug zur Wanne, die Wannenneigung und die konstruktiv bedingte Unwucht des Turms in seiner Hochachse unvermeidlich auftreten können. Im Nachfolgenden wird im Summator das Winkelsignal mit dem Signal des Gebers der linearen Beschleunigung zu einem gemeinsamen Signal umgeformt und anschließend im Verstärker so verstärkt, dass das Ausgangssignal über die Steuerwicklungen den Elektromaschinenverstärker den angeschlossenen Elektromotor des Turmschwenkwerks so ansteuern kann, das der Turm wieder in die Sollage zurückführt wird. Das
Richten der Kanone in der Vertikalen und des Turms in der Horizontalen
wird durch Hervorrufen einer künstlichen Präzessionsbewegung
der Kreisel der Winkelgeber Vertikal bzw Horizontal realisiert.
Beim Verdrehen der Richtgriffe wird im entsprechenden Potentiometer
ein Signal in Stärke proportional zur Größe der Verdrehung der
Richtgriffe erzeugt. Dieses Signal erzeugt in den Richtmagneten
des jeweiligen Winkelgebers ein Magnetfeld, das als künstliche
Störgröße ein Verdrehen des Kreiserahmens hervorruft. Der Kreisel
verändert unter Einwirkung des entstehenden Präzessionsmoments
seine Lage. Geht der Richtgriff in die Nulllage zurück, verbleibt
der Kreisel in der neu eingenommenen Lage. Der Turm, beim Richten
in der horizontalen Ebene unmittelbar bzw. die Visierlinie in der Vertikalen
befinden sich nun in einer neuen Solllage. Die Kanone wird der
neuen vertikalen Solllage unmittelbar nachgeführt. Bei der Anlage
2E42-4 folgt auch der Turm der Visierlinie in der Horizontalen. Die Stabilisierung der Visierlinie bei der Modifikation 2E42-2 mit dem TPD-K1 erfolgt in gleicher Weise wie beim Stabilisator 2E28M. Wird hingegen das Zielfernrohr 1G46 verwendet, in der Regel in Verbindung mit der Modifikation der Stabilisierungsanlage unter der Bezeichnung 2E42-4, dann befinden sich im Zielfernrohr neben dem Kreisel des Winkelgebers Vertikal zusätzlich auch der Kreisel des Winkelgebers Horizontal. Die Funktionsweise dieser Art einer Visierlininestabilisierung stellt sich am Beispiel der vertikalen Ebene wie folgt dar. Ein Kreiselrahmen ist in einer Kreiselrahmenaufhängung frei beweglich um die Querachse X-X aufgehängt. Auf der Querachse befinden sich seitlich ein Drehtransformator als Winkelgeber für die Stabilisierung in der Vertikalen und gegenüberliegend ein reversibler Elektromotor als Stellglied. Außerdem trägt die Achse der Kreiselrahmenaufhängung auch das Parallelogrammgestänge, das die Verbindung zur Kanonenwiege herstellt. In der Kreiselrahmenaufhängung ist der Kreiselrahmen so aufgehängt, dass er sich um die Hochachse Z-Z frei drehen kann. Auf der Hochachse der Kreiselrahmenaufhängung befinden sich unten ein Drehtransformator als Winkelgeber für die Stabilisierung in der Horizontalen und oben ein reversibler Elektromotor als Stellglied. Der Kreiselrahmen trägt die sogenannte Kreiselplattform, die selbst aus zwei inneren Kreiselrahmen besteht. Einer dieser Kreiselrahmen trägt den Kreisel (rot) für die Horizontalstabilisierung und der andere den Kreisel (rot) für die Vertikalstabilsierung. Die Achsen beider Kreisel liegen auf einer gemeinsamen Längsachse Y-Y. Jedoch ist verläuft die Achse der Aufhängung des Horizontalkreisels parallel zur Querachse der äußeren Kreiselaufhängung und die Achse der Aufhängung des Vertikalkreisels verläuft parallel zur Hochachse des Kreiselrahmens. Beide Kreisel sind mit Winkelgebern und elektrischen Richtmagneten verbunden.
Wirkt auf die Kreiselplattform
ein äußeres, vertikales Störmoment ein, weil beispielsweise
der Turm gemeinsam mit dem Gehäuse des Zielfernrohres im Gelände
um seine Querachse X-X schwingt, dann führt das Störmoment zu einer
Verdrehung der Kreiselplattform um die Querachse X-X der Aufhängung
des Kreiselrahmens. Dabei tritt am Vertikalkreisel eine Präzessionsbewegung
des Kreisels (rot) um seine Hochachse ein. Der Geber der Rückstellung
(grün) auf der Kreiselplattform misst die Größe des Fehlerwinkels.
Aus dem Signal des Gebers wird proportional zum Fehlerwinkel
ein Steuersignal erarbeitet und nach Umformung und Verstärkung
auf den reversiblen Elektromotor Vertikal (gelb) auf der Querachse
X-X des Kreiselrahmens gegeben. Die Größe des Rückstellmoments
wächst proportional zum Winkel der Drehung der Kreiselplattform,
ist aber der äußeren Störkraft entgegen gerichtet. Wenn das
Rückstellmoment das äußere Störmoment vollständig ausgeglichen
hat, beginnt die Rückführung der Kreiselplattform in die Solllage.
Der Kopfspiegel folgt über die mechanische Verbindung den Drehbewegungen
der Querachse des Kreiselrahmens während der Stabilisierung
und während des Richtens der Kanone in der Vertikalen. Das Richten der Visierlinie. Beim
Verdrehen der Richtgriffe werden die Richtmagneten (gelb) angesteuert.
Es kommt in der Folge zu einer Verdrehung der Aufhängung des
jeweiligen Stabilisierungskreisel, was wiederum eine Präzessionsbewegung
des Kreisels zur Folge hat. Unter der Kraft des Kreiselmoments
verdreht sich die Querachse des Kreiselrahmens für die Vertikale
bzw. die Hochachse der Aufhängung der Kreiselplattform für die
Horizontale. Diese Drehbewegung wird über die mechanische Verbindung
auf die Spiegel übertragen. Dabei entsteht auch ein Signal in
den Winkelgebern (hellgrün) die sich auf der X-bzw. Z-Achse
befinden. Dieses Signal wird von der Stabilisierungsanlage 2E42
umgesetzt in Richtbewegungen von Kanone bzw. Turm bis diese
wieder auf die Sollage zurückgeführt sind. Werden die Richtgriffe in
die Neutrallage zurückgeführt, geht das Präzessionsmoment auf
Null zurück und der Kreisel nimmt die Normallage wieder ein. Die letzte Darstellung zeigt das Funktionsschaltbild des Stabilisators 2E42-4 wie es bei Zusammenfassung der bekannten Informationen prinzipiell als wahrscheinlich angenommen werden kann. Der Hauptunterschied zur Modifikation 2E42-2 besteht darin, dass im Hauptzielfernohr 1G46 nun zwei Kreisel als Winkelgeber Vertikal bzw. Horizontal untergebracht sind. Unter der Kanone befindet sich wiederum ein Kreiselblock mit zwei Kreiseln. Da der bisherige Winkelgeber für die Horizontale ins Hauptzielfernrohr verlegt wurde, ist es zulässig anzunehmen, dass seiner Stelle nun ein Geber für die Winkelgeschwindigkeit in der horizontalen Ebene eingesetzt wurde. Im Weiteren kann davon ausgegangen werden, dass der Aufbau ansonsten dem Stabilistator 2E42-2 entspricht. Auch die Funktion und das Zusammenspiel der Baugruppen ist gleich dem 2E42-2. Auf eine nochmalige Erläuterung kann somit verzichtet werden.
Der Waffenstabilisator 2E42 ist inzwischen
seit über 30 Jahren im Einsatz, wurde mehrfach modifiziert und
an verschiedene Hauptzielfernrohre angepasst und auch immer
wieder im Zuge des technologischen Fortschritts modernisiert.
Die Anlage kann mit Recht als durchkonstruiert und äußerst zuverlässig
bezeichnet werden. Für den T-14 Armata und auch für den T-90MS
wurde nach Presseberichten ein weiterentwickelter Stabilisator
mit der Bezeichnung 2E58 entwickelt. Es ist anzunehmen, dass
die funktionellen Grundprinzipien, wie oben beschrieben, prinzipiell
weiterhin Geltung besitzen. Der technische Fortschritt erlaubte
aber nunmehr die Abkehr vom hydraulischen Vertikalrichtantrieb.
Es kommen statt dessen elektrische Richtantriebe für das Richten
von Kanone und Turm zum Einsatz. Der Elektromaschinenverstärker
kann inzwischen durch hochleistungsfähige Energieelektronik
ersetzt werden, - und das wird hier wahrscheinlich auch der
Fall sein - wobei der Stromverbrauch beträchtlich sinkt, die
Anlaufzeit bis zur Leistungsabgabebereitschaft drastisch geringer
ist, die Reaktionszeit bei der Leistungsabforderung erheblich
sinkt und zugleich deutlich größere elektrische Leistungen und
Drehmomente der Elektromotoren an den Richtantrieben realisiert
werden können. Nicht unbeachtet sollte der Umstand sein, dass
bei dieser neuen Energieelektronik die bisherigen elektromechanischen
Baugruppen fehlen und sie deshalb nahezu geräuschlos arbeiten.
Die Gefährdung der Überlebensfähigkeit durch aus Lecks unter
hohem Druck ausprühendes Hydrauliköl wurde bereits erwähnt.
Wahrscheinlich ist auch der Einsatz von Laserkreiseln. In
der folgenden Tabelle sind die Hauptkennwerte der Anlage aufgeführt:
Literatur 1) Erzeugnis 2E42-2, Technische Beschreibung und Bedienungsanleitung, Russland, Unbekannt, 19922) Konstruktion der Elektrospezialausrüstung von Panzerbewaffnung und Technik, Lehrbuch Bd 1, Staatliche Technische Universität Omsk, 2011 3) Baugruppen der Bewaffnung und ihr Gefechtseinsatz, Lehrbuch, Bd.2,Staatliche Technische Universität Omsk, 2012 4) A051/1/331 Stabilisator 2E28M, DDR, Verteidigungsministerium, 1984 5) Webseite Allrussisches Forschungsinstitut Signal, http://vniisignal.ru/ |
||||||||||||||||||
|
|
|
)
)
)
)